

The Unitree G1 EDU Ultimate Robotic Humanoid is a major leap in the field of personal robotics.
These robots are made in Hangzhou, Zhejiang, China.
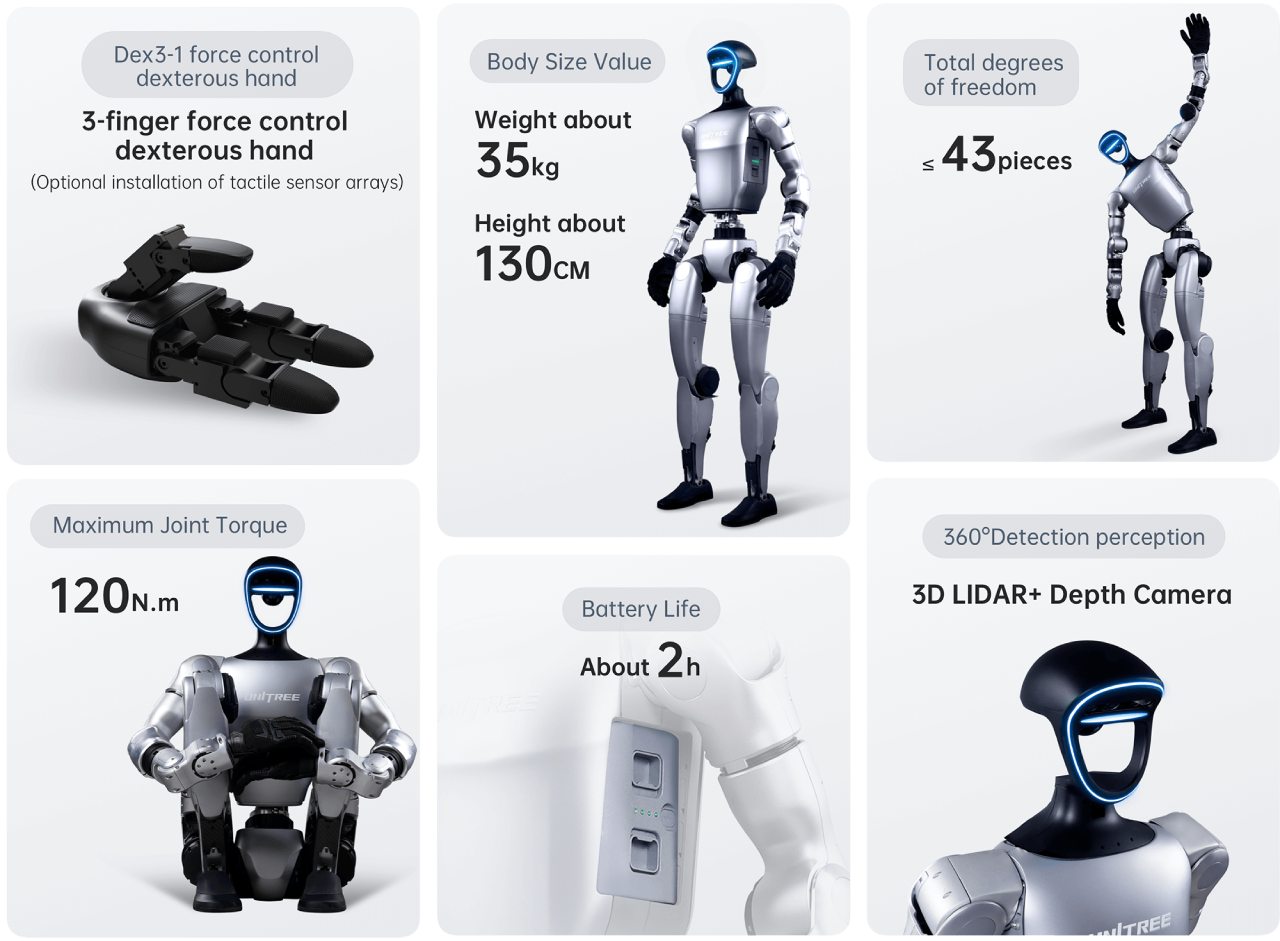
This robot features:
42 Degrees of Freedom (Full-Body Dexterity)
-
Human-like joint articulation (arms, legs, torso, hands)
-
Fine-grained manipulation + full locomotion
-
Research-grade whole-body control experiments
-
Advanced balance, gait, and dynamic motion studies
Most humanoids in this price tier don’t combine this level of articulation with mobility.
Dual Dex3-1 Force-Controlled Hands (True Manipulation Capability)
This is arguably the standout feature.
-
Force-controlled fingers (not just position-controlled)
-
Enables delicate grasping (tools, lab objects, human interaction)
-
Suitable for manipulation research, not just walking demos
-
Much closer to human hand research applications
Most humanoids look impressive. Very few can actually manipulate well.
100 TOPS Onboard AI Compute (NVIDIA Jetson Orin, 16GB)
100 trillion operations per second on-device.
That enables:
-
Real-time perception
-
Vision + depth fusion
-
Reinforcement learning experiments
-
Onboard autonomy (not cloud-dependent)
For AI research, edge compute is critical — this is serious embedded horsepower.
Advanced Sensor Stack (Mid-360 LiDAR + Intel D435i Depth)
You get both:
-
External LiDAR (Mid-360) for mapping + SLAM
-
Intel RealSense D435i for depth perception
That combination supports:
-
Indoor navigation
-
Obstacle avoidance
-
Human tracking
-
Environment modeling
-
Multi-modal perception research
This makes it a serious autonomy research platform — not just a lab toy.
Research-Focused Platform (Secondary Development Supported)
This is subtle but important.
The EDU Ultimate A is designed for:
-
AI research
-
HRI (Human–Robot Interaction)
-
Custom algorithm deployment
-
Secondary development (SDK access, control stack access)
Many humanoids are closed demos.
This one is positioned as a modifiable research platform.
Buy
https://robostore.com/products/unitree-g1-edu-ultimate-a-robotic-humanoid